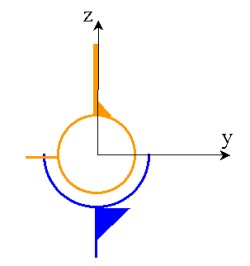
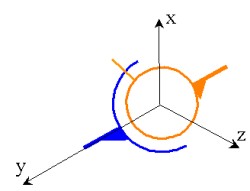
Liaison rotule à doigt.
Schéma plan
Schéma spatial
T
R
0
Rx
0
Ry
0
0
Bilan :
0 translation
2 rotations
2 d° de liberté